BOULKOUR Houssem
ING Electronique

 Number of posts : 263 Number of posts : 263
Age : 39
Localisation : CONSTANTINE
Emploi : Ingénieur en électronique
Loisirs : robotique
Registration date : 2007-01-25
 |  Subject: L'asservissement du robot serial "SEROR 2006 " Subject: L'asservissement du robot serial "SEROR 2006 "  Sun 29 Apr - 19:54 Sun 29 Apr - 19:54 | |
| Asservissement en position du robot serial "SEROR 2006 "
Le but de ce projet est de réaliser un système d'asservissement pour la commande en position des articulations d'un robot sériel "SEROR 2006 ". L e robot ainsi que le système d'asservissement sont conçus et réalisés au laboratoire des applications et de la technologie avancée (LATA) UNIVERSITE MENTOURI DE CONSTANTINE . Le programme du contrôle du robot est écrit en langage Java
• Comme la commande est effectuée par computer, une carte d'acquisition a été réalisée.
• Pour la carte d'acquisition on a utiliser un convertisseur A/N avec un circuit de synchronisation et d'adaptation avec le PC pour effectuer le retour d'information (feed back).
Schéma synoptique de La carte d'acquisition
Concernant les capteurs, on a utilisé des potentiomètres professionnels Le principe de fonctionnement :
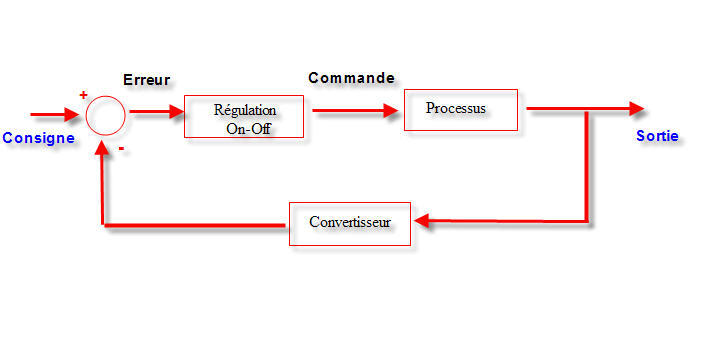
Le processus fonctionne de la manière suivante :
- on commande les moteurs par une carte de puissance.
- les potentiomètres (les capteurs) sont liés aux moteurs.
- les capteurs nous donne des informations.
- les informations sont traitées par une carte d'acquisition professionnelle.
- Puis on les commandées et contrôlées par un programme en java.
- Puis on compare les résultats obtenus. la figure suivante ci-dessous donne en générale le principe de fonctionnement:
Nous souhaitons discuter avec des personnes intéressées les problèmes de contrôle. Réaliser par : BOULKOUR Houssem Eddine & CERTIOUA Seif Eddine Diriger par : Pr ZAATRI Abdelouahab | |
|